Z czym jest największy problem w trakcie misji w kosmos? Z ludźmi. Stąd właśnie naukowcy opracowują systemy, które pozwolą ludziom kontrolować wyspecjalizowane roboty na odległość, zapewniając większą precyzję przy wykonywaniu takich zadań jak pobieranie próbek, kopanie czy montaż. W wyniku tego wszystkiego badacze chcą zwiększyć efektywność misji, a także zminimalizować konieczność bezpośredniej obecności człowieka na powierzchni ciał niebieskich. Głównie chodzi (na razie) o Marsa i Księżyc.
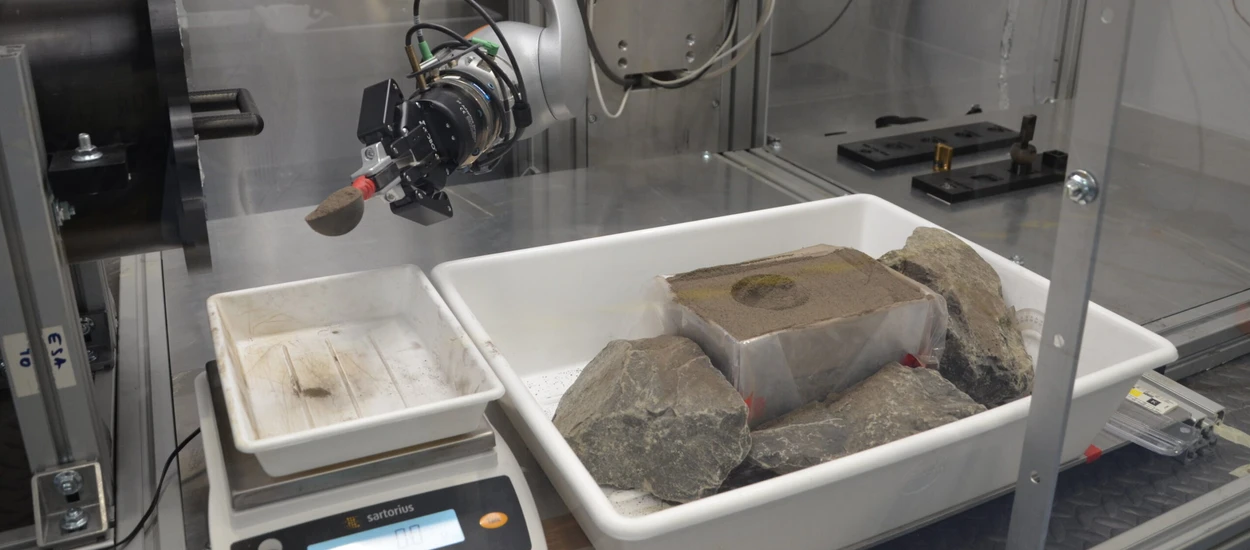
Zespół z Uniwersytetu w Bristolu prowadzi zaawansowane testy systemu teleoperacji. Część z nich przeprowadzono już w Europejskim Centrum Aplikacji Kosmicznych i Telekomunikacji ESA w Harwell. Wykorzystując zaawansowany symulator (warto sprawdzić film poniżej!), naukowcy mogli sterować ramieniem robota, które wydobywało próbki z symulatora księżycowego regolitu. Ciekawe jest to, że nie trzeba przesyłać obrazu z kamer, co niweluje problem opóźnień sygnału, wynikających z odległości między Ziemią a Księżycem – a nie jest to opóźnienie małe: wynosi bowiem 1,3 sekundy. Informacje z robotów mogłyby być przesyłane za pośrednictwem satelitów, które ESA planuje umieścić na orbicie Księżyca w ramach projektu Moonlight.
Jednym z najciekawszych elementów systemu jest możliwość interakcji dotykowej. Dzięki odpowiedzi haptycznej operatorzy na Ziemi mogą odczuwać dotyk, imitujący właściwości regolitu w warunkach księżycowej grawitacji, która wynosi około jednej szóstej grawitacji ziemskiej. Takowa symulacja umożliwia teleoperatorom lepszą kontrolę nad narzędziami robota, ułatwiając kopanie i pobieranie próbek z powierzchni Księżyca. W skrócie: operator ma czuć się dosłownie tak, jak robot i czuć jak robot.
Nawet jeśli takowe "operacyjne symulatory" nie przydadzą się "w akcji", to mogą być doskonałym polem do przygotowań do docelowej misji z załogą. Owo rozwiązanie pozwoli przyszłym uczestnikom misji możliwość zapoznania się z warunkami panującymi na Księżycu jeszcze przed wylotem. Tego rodzaju trening — w opinii twórców — zwiększy skuteczność przyszłych działań eksploracyjnych.
Zanim jednak system teleoperacji zostanie wdrożony na szerszą skalę, istnieją pewne kwestie do rozwiązania. Z badań wynika, że użytkownicy często mają problem z pełnym zaufaniem do działania systemów o takim poziomie "wirtualizacji". Dlatego też zespół z Bristolu dokładnie analizuje skuteczność rozwiązania, stwierdzając, że podczas symulacji zbierania regolitu system działał poprawnie w 100% przypadków, natomiast precyzja operacji przenoszenia płynnych próbek wynosiła 92,5%. Wciąż trwają prace nad poprawą dokładności innych zadań.
Podobne technologie mogłyby znaleźć zastosowanie także w misjach na Marsa. Mogłyby ułatwić zbieranie próbek przez łaziki i ich załadunek na statki mające na celu powrót na Ziemię, co jest jednym z kluczowych zadań w tego typu działaniach. Jeżeli tylko rozwiązanie zostanie odpowiednio rozwinięte — może być niesamowicie ważnym narzędziem w rękach agencji kosmicznych oraz prywatnych firm z tego sektora.
Z nowości może skorzystać nawet program Artemis, niewykluczone, że teleoperacja stanie się częścią chińskiego programu Chang'e. Jeśli nie okażą się narzędziami "pierwszego wyboru" w trakcie misji, to staną się po prostu bardzo interaktywnymi symulatorami, które przygotują astronautów do lotu.
Hej, jesteśmy na Google News -
Obserwuj to, co ważne w techu